مقدمه
امروزه و به خصوص در سالهای اخیر نیاز به شبیهسازیهای پیچیده دینامیکی در صنایع مختلف نظیر خودروسازی ، هوافضا، روباتیک و انرژی های تجدید پذیر بهطور چشمگیری افزایش یافته است . ابزار ANSYS Motion بهعنوان یکی از پیشرفته ترین نرم افزارهای شبیهسازی دینامیک چندبخشی (Multibody Dynamics) شناخته میشود که توانایی مدلسازی حرکت قطعات مکانیکی با دقت بالا را دارد. با افزوده شدن قابلیت محاسبات موازی و اجرای این شبیهسازیها بر روی ابررایانه (HPC)، کارایی و سرعت حل مسالهها بهصورت قابل توجهی ارتقاء یافته است. در این مقالهی سئو شده و جامع، ابتدا با ANSYS Motion آشنا میشویم، سپس به مزایا و ضرورت استفاده از ابررایانه در کنار این نرمافزار میپردازیم و در نهایت بهترین روشها، نکات کاربردی و مثالهای پیادهسازی در محیط HPC را بررسی خواهیم کرد.
فهرست مطالب
- ANSYS Motion چیست؟
- قابلیتها و ویژگیهای کلیدی ANSYS Motion
- ۲.۱. مدلسازی چندبخشی (Multibody)
- ۲.۲. اتصال به سایر ماژولها (Co-Simulation)
- ۲.۳. شبیهسازی دینامیک همراه با نیروها و ارتعاشات
- ۲.۴. خروجی های پیشرفته و تحلیلهای پس پردازش
- چرا از ابررایانه (HPC) استفاده کنیم؟
- ۳.۱. افزایش سرعت محاسبات
- ۳.۲. حل مسائل مقیاسپذیر و بزرگ
- ۳.۳. بهینهسازی مصرف منابع و هزینه
- نحوه اجرای ANSYS Motion بر روی ابررایانه
- ۴.۱. پیشنیازها و معماری سختافزاری
- ۴.۲. نصب و پیکربندی ANSYS Motion برای محاسبات موازی
- ۴.۳. تقسیمبندی کاری (Domain Decomposition) و تنظیمات Core/Node
- ۴.۴. استفاده از Job Scheduler و مدیریت صفها (SLURM, PBS, LSF)
- بهینهسازی شبیهسازیهای دینامیکی
- ۵.۱. تنظیمات Mesh و گریدهای دینامیکی
- ۵.۲. انتخاب روش حل عددی مناسب
- ۵.۳. کاهش کروشهسازی (Constraint) و ارتقاء پایداری عددی
- ۵.۴. پایش مصرف حافظه و پروفایلینگ
- مطالعه موردی: شبیهسازی سیستم تعلیق خودرو با ANSYS Motion در محیط HPC
- ۶.۱. تعریف مسئله و هندسه مدل
- ۶.۲. تنظیمات مواد و خواص مکانیکی
- ۶.۳. گامهای حل و تقسیم بندی بر روی چندین گره
- ۶.۴. نتایج، تحلیل عملکرد و مقایسه با شبیهسازی تکهستهای
- مزایا و چالشهای استفاده از ANSYS Motion با ابررایانه
- ۷.۱. افزایش بهرهوری پروژه .
- ۷.۲. بهبود دقت و جزئیات مدل
- ۷.۳. هزینه و پیچیدگی زیرساختی
- نکات کلیدی برای پیادهسازی موفق
- ۸.۱. انتخاب سختافزار مناسب.
- ۸.۲. بهروزرسانی نرمافزار و درایورها
- ۸.۳. آموزش کاربران و مستندسازی
- ۸.۴. مدیریت نسخه ها و پشتیبانگیری ( Backup)
- نتیجهگیری
ANSYS Motion چیست؟
ANSYS Motion یکی از زیرمجموعه های قدرتمند پکیج نرم افزاری ANSYS است که برای شبیهسازی دینامیک چندبخشی (Rigid and Flexible Multibody Dynamics) طراحی شده است. این نرم افزار نه تنها امکان مدلسازی حرکت اجزای مکانیکی مانند قطعات صلب و انعطافپذیر را فراهم میکند ، بلکه با ارائه ی قابلیتهای ویژه ای مانند وارد کردن نیروها، اصطکاکها، اتصالات مکانیکی (پیچ، لولا، فنر و غیره) و رفتارهای غیرخطی، امکان تحلیل دقیق پدیدههای دینامیکی را میسر میسازد.
در حالت کلی، ANSYS Motion از دو رویکرد اصلی برای حل معادلات حرکت استفاده میکند:
- سیمپلکس صلب (Rigid Body Dynamics): در این روش، اجزا کاملاً صلب فرض میشوند و تنها حرکتهای تراجمی (Translational) و دورانی (Rotational) تحلیل میشود.
- سیمپلکس انعطافپذیر (Flexible Body Dynamics): در این رویکرد، قطعات مکانیکی به صورت المانهای خطی یا غیرخطی با قابلیت تغییر شکل (Deformable) مدل میشوند تا تأثیر ارتعاشات و تنشهای داخلی در عملکرد سیستم بررسی گردد
به علاوه بر اینها، این نرم افزار برای مهندسان مکانیک، خودروسازی، هوافضا، رباتیک و حوزههایی که نیاز به تحلیل دقیق حرکت قطعات دارند؛ ابزاری عالی محسوب میشود .
قابلیتها و ویژگی های کلیدی ANSYS Motion
۲.۱. مدلسازی چندبخشی (Multibody)
- توابع اتصال مکانیکی (Joints): لولا (Hinge), غلطک (Roller), فنر (Spring), اتصالات غیرخطی، و …
- شبیهسازی تعاملهای مکانیکی: امکان تعریف اصطکاک، نیروهای تماس و برخورد بین اجزا.
- قابلیت وارد کردن مدلهای CAD: پشتیبانی از فرمتهای رایج CAD مانند Parasolid، STEP، IGES و انتقال هندسه به صورت مستقیم .
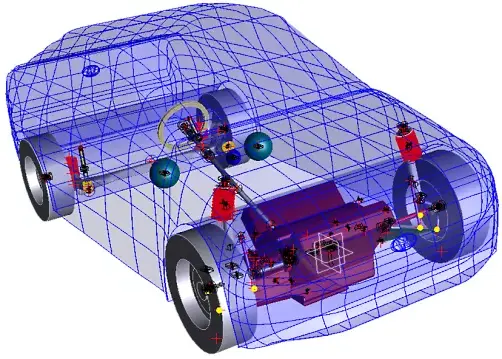
۲.۲. اتصال به سایر ماژولها ( Co-Simulation )
- ANSYS Workbench Integration: تبادل اطلاعات میان ANSYS Motion و ماژولهای استاتیکی (Static), دینامیکی المان محدود ( Transient FEA), و سیالات (CFD).
- پشتیبانی از ارتباط با نرمافزارهای خارجی: بهصورت co-simulation میتوان با نرمافزارهایی مانند MATLAB/Simulink، Simpack و CarSim تعامل داشت
۲.۳. شبیه سازی دینامیک همراه با نیروها و ارتعاشات
- تحلیل گذرا (Transient Analysis): محاسبه حرکتهای گذرا سیستم تحت نیروهای متغیر در زمان
- تحلیل ارتعاشات (Vibration Analysis): بررسی فرکانسهای طبیعی سیستم، دامنه ارتعاشات و پاسخ دینامیکی به تحریکات محیطی .
- بررسی ایمنی و پایداری دینامیکی: محاسبه مقادیر G-force، تنشهای دینامیکی و تشخیص نقاط بحرانی
۲.۴. خروجیهای پیشرفته و تحلیلهای پس پردازش
- گزارشگیری سفارشی: تهیه نمودارهای موقعیت، سرعت، شتاب و نیروی اتصالات در طول زمان
- فیلمبرداری از حرکت (Animation): تولید انیمیشنهای سهبعدی برای نمایش حرکت دستگاه.
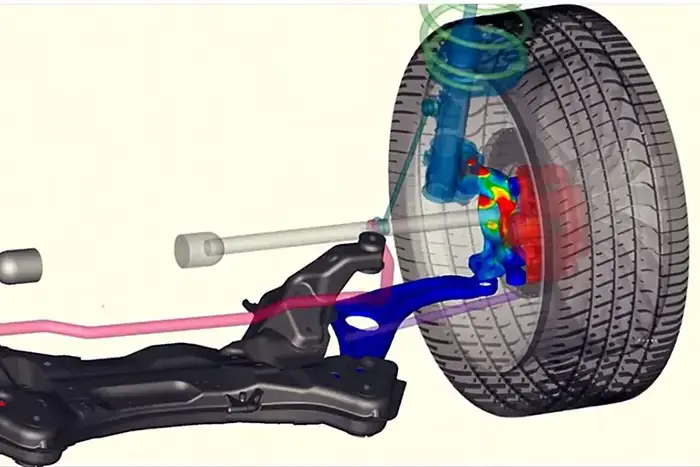
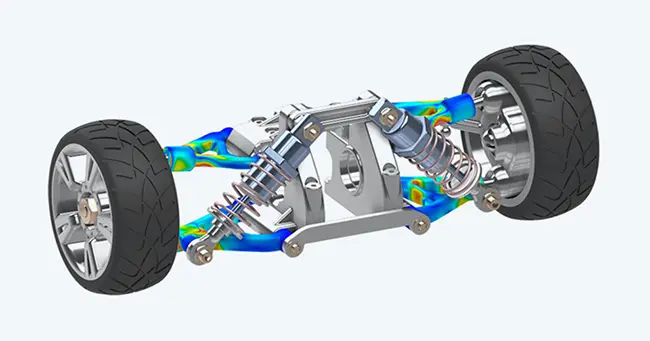
- تصویرسازی میدان تنش و کرنش در حالت انعطافپذیر: مشاهده نقاط دارای بیشینه کرنش و تمرکز تنش در اجزای انعطافپذیر
چرا از ابررایانه (HPC) استفاده کنیم؟
۳.۱. افزایش سرعت محاسبات
شبیه سازی های دقیق دینامیک چندبخشی بهویژه زمانی که مدلها شامل اجزای انعطافپذیر و تماسهای پیچیده باشد، بار محاسباتی سنگینی را به دنبال دارد. با تقسیم مسئله بر روی صدها تا هزاران هسته (Core) و گره (Node) در یک ابررایانه، زمان حل میتواند از روزها یا حتی هفتهها به چند ساعت یا دقیقه کاهش یابد
۳.۲. حل مسائل مقیاس پذیر و بزرگ
- مدلهای بزرگ و دقیق: زمانی که تعداد قطعات مکانیکی بسیار زیاد بوده و هر کدام نیازمند صدها هزار المان برای تحلیل غیرخطی باشند ، تنها یک HPC قادر به اجرای سریع و همزمان ماژولهای مختلف است.
- شبیهسازیهای مونت کارلو (Monte Carlo): در تحلیل حساسیت و بهینهسازی، نیاز به اجرای چندین تکرار شبیهسازی با پارامترهای مختلف داریم ؛ ابررایانه با قابلیت توزیع بار، این فرایند را بهشکل موازی انجام میدهد.
۳.۳. بهینه سازی مصرف منابع و هزینه
- اجاره ابررایانه (Cloud HPC ): به جای خرید زیرساخت فیزیکی گرانقیمت، میتوان از خدمات رایانش ابری (AWS HPC, Azure HPC, Google Cloud HPC) استفاده کرد و هزینهها را بر اساس مصرف پرداخت نمود.
- مدیریت مصرف حافظه و پردازنده : امکان تخصیص دقیق منابع به هر شبیهسازی، جلوگیری از اتلاف منابع و تسریع روند کار

نحوه اجرای ANSYS Motion بر روی ابررایانه
۴.۱. پیشنیازها و معماری سختافزاری
- سرورها (Nodes)
- CPU: پردازندههای چندهستهای با معماری x86_64، Intel Xeon یا AMD EPYC توصیه میشوند.
- حافظه (RAM): حداقل ۶۴ گیگابایت برای هر نود؛ برای شبیهسازیهای بزرگ، ۲۵۶ یا ۵۱۲ گیگابایت توصیه میشود
- کارت شبکه سریع (InfiniBand یا Ethernet 100Gbps) برای کاهش تأخیر در تبادل داده میان گرهها.
- نرمافزار سیستمعامل
- توزیع های لینوکس پایدار مانند CentOS، Red Hat Enterprise Linux (RHEL) یا Ubuntu LTS
- کتابخانههای موازی
- MPI (Message Passing Interface): برای توزیع محاسبات میان گرهها.
- Intel MKL یا OpenBLAS: برای بهینهسازی عملیات جبری ماتریسی .
- نسخه مناسب از ANSYS Motion
- اطمینان از نصب لایسنس شبکهای (Floating License) و تنظیم صحیح متغیرهای محیطی (ANSYSLMD_LICENSE_FILE)
۴.۲. نصب و پیکربندی ANSYS Motion برای محاسبات موازی
- نصب نرمافزار
- دانلود نسخه لینوکس ANSYS Motion متناسب با توزیع (مثلاً Linux x86_64).
- اجرای اسکریپت installer و اختصاص مسیر نصب(مثلاً
/opt/ansys/2025R1/Motion).
- تنظیم متغیرهای محیطی
export ANSYS_DIR=/opt/ansys/2025R1 export PATH=$ANSYS_DIR/Motion/bin:$PATH export LD_LIBRARY_PATH=$ANSYS_DIR/Motion/lib:$LD_LIBRARY_PATH export ANSYSLMD_LICENSE_FILE=5280@license_server_ip - فعالسازی مد موازی (Parallel Mode)
- در فایل تنظیمات ANSYS Motion (motion.ini)، پارامترهای مربوط به استفاده از MPI و تعداد هستهها را تعیین کنید.
- مطمئن شوید که
mpiexecیاmpirunدر مسیر سیستم تعریف باشد.
۴.۳. تقسیمبندی کاری (Domain Decomposition) و تنظیمات Core/Node
- تعیین تعداد گرهها و هسته ها
- بسته به پیچیدگی مدل، میتوانید از ۲ تا چند صد گره با هرکدام چندین هسته استفاده کنید.
- بهترین شیوه: شروع با تعداد هسته کمتر (مثلاً ۱۶ یا ۳۲) و بررسی مقیاسپذیری (Scalability) سپس افزایش تعداد هسته برای رسیدن به تسریع خطی (Linear Speedup).
- پیکربندی MPI
- استفاده از دستوراتی مانند:
mpirun -np 128 -hostfile hosts_file ansys_motion -b job_name.inp -mpi shared-np 128: تعداد کل هستهها-hostfile hosts_file: نام فایلی که در آن لیست نودها و هستهها ثبت شده است-mpi shared: نوع پیکرهبندی ارتباط میان هستهها
- استفاده از دستوراتی مانند:
۴.۴. استفاده از Job Scheduler و مدیریت صفها ( SLURM, PBS, LSF)
- نمونه فایل اسکریپت برای SLURM
#!/bin/bash #SBATCH --job-name=ansys_motion_job #SBATCH --nodes=4 #SBATCH --ntasks-per-node=32 #SBATCH --time=24:00:00 #SBATCH --partition=compute #SBATCH --output=ansys_motion_%j.out module load ansys/2025R1 module load mpi/openmpi srun --mpi=pmix_v3 ansys_motion -b my_motion_input.inp -mpi shared- توضیح پارامترها:
--nodes=4: تعداد نودهای درخواستی--ntasks-per-node=32: تعداد هستهها در هر نود--time=24:00:00: زمان مجاز اجرای شبیهسازیsrun --mpi=pmix_v3: اجرای برنامه با MPI
- توضیح پارامترها:
- مدیریت صف و اولویتبندی
- تنظیم محدودیتهای مصرف RAM و CPU
- اختصاص نود های مخصوص با در نظر گرفتن تداخل منابع دیگر کاربران
بهینهسازی شبیهسازیهای دینامیکی
۵.۱. تنظیمات Mesh و گریدهای دینامیکی
- کیفیت مش (Mesh Quality):
- استفاده از المانهای مثلثی یا چهاروجهی با نسبت ابعاد مناسب.
- تعریف نواحی با المانریز بالا (Refinement) در نقاط بحرانی مانند اتصالات یا سطوح تماس.
- Mesh Sizing Strategy :
- برای اجزای صلب (Rigid) نیازی به مشبندی پیچیده نیست؛ اما برای اجزای انعطافپذیر، باید از مشبندی خطی با تترایدرال یا هگزادیترال دقیق استفاده کرد.
- Adaptive Mesh Refinement :
- در مواقعی که تغییر شکل زیاد است، استفاده از Adaptive Mesh برای حداقل کردن اندازههای المان در زمان حل توصیه میشود.
۵.۲. انتخاب روش حل عددی مناسب
- Implicit vs. Explicit Solver:
- برای شبیهسازیهای با درگیری بالا (High Contact ) و ناپایداریهای دینامیکی شدید ، استفاده از Explicit Solver مناسبتر است ؛ هرچند هزینه زمانی بیشتری دارد.
- برای تحلیلهای آرام ( Quasi-Static ) یا گذرا ( Transient) با زمانحل طولانی ، Implicit Solver با گامهای زمانی بزرگتر، سرعت را افزایش میدهد.
- تنظیمات Time Integration:
- تعیین مناسب Time Step بهگونهای که شرط Courant رعایت شود.
- در مدلهای انعطافپذیر، ممکن است نیاز به time step بسیار کوچک باشد تا ناپایداری عددی به حداقل برسد.
۵.۳. کاهش کروشهسازی (Constraint) و ارتقاء پایداری عددی
- کاهش دستورات Constraint بیمورد :
- هرچه تعداد قیود (Constraints) در مدل بیشتر باشد، معادلات تعدادشان افزایش یافته و زمان حل نیز بالاتر میرود.
- استفاده از قیود ترکیبی و تعریف درایورهای غیرخطی (Nonlinear Driver) بهجای ایجاد چندین قیود مستقل
- بهینهسازی اتصالات تماسی (Contact):
- تعریف سطوح تماس و انتخاب روشهای تماس (Penalty, Lagrange) با دقت مطلوب.
- تعیین Contact Pair تنها در نواحی ضروری؛ حذف تماسهای غیرضروری
۵.۴. پایش مصرف حافظه و پروفایلینگ
- مانیتور مصرف RAM:
- در حین اجرا، با استفاده از ابزارهای نظارتی همچون
htop,topیاvmstatمیزان مصرف حافظه را بررسی کنید - در صورت اتمام حافظه RAM، سیستم به Swap رفته که بهطور قابل توجهی سرعت را کاهش میدهد .
- در حین اجرا، با استفاده از ابزارهای نظارتی همچون
- Profile کردن زمان حل:
- استفاده از ANSYS Performance Profiler جهت تشخیص گلوگاهها ( Bottleneck )
- استخراج گزارش کامل زمان مصرفی در مراحل Assembly، Solve و Post-processing
مطالعه موردی: شبیهسازی سیستم تعلیق خودرو با ANSYS Motion در محیط HPC
۶.۱. تعریف مسئله و هندسه مدل
- هندسه: مدل سهبعدی سیستم تعلیق جلوی یک خودروی سواری شامل بازوها ( Control Arms)، کمکفنر (Shock Absorber) ، میل موجگیر (Stabilizer Bar) و چرخ
- تعداد اجزا: حدود ۲۰ جزء صلب (Rigid Bodies ) و ۴ جزء انعطافپذیر (المانسازی FEA برای کمکفنر)
- قیود:
- اتصال چرخ به بازوها با مفصل گردان (Revolute Joint)
- اتصال کمکفنر به بدنه با مفصل انعطافپذیر ( Flexible Connection)
- تماس لاستیک با سطح جاده
۶.۲. تنظیمات مواد و خواص مکانیکی
- مواد صلب (Rigid Bodies):
- فولاد با چگالی ۷۸۵۰ kg/m³
- مدول یانگ ۲۱۰ GPa، ضریب پواسون ۰.۳
- کمکفنر (Flexible Body):
- فایل Mesh شده از طریق Ansys Mechanical با المانهای Solid185
- تعریف خواص الاستیک و افزودن مدل میرایی (Damping).
۶.۳. گامهای حل و تقسیمبندی بر روی چندین گره
- پیشپردازش (Pre-processing)
- وارد کردن هندسه CAD در ANSYS Workbench و تعریف مواد، قیود، تماسها و Initial Conditions
- ایجاد فایل .inp مختص ANSYS Motion
- تنظیمات موازیسازی
- اختصاص
nodes=8وcores-per-node=32در اسکریپت SLURM - پیکربندی
mpirun -np 256 ansys_motion -b suspension.inp -mpi shared
- اختصاص
- اجرای شبیهسازی
- زمان کل شبیهسازی: ۱۰۰ ثانیه شبیهسازی واقعی با گام زمانی ۰.۰۰۱ ثانیه
- پیشبینی میشود کامپایل ماتریسها در ۲ ساعت و حل عددی دینامیک در ۶ ساعت انجام شود.
۶.۴. نتایج، تحلیل عملکرد و مقایسه با شبیه سازی تک هسته ای
- زمان حل:
- اجرا بر روی ابررایانه با ۲۵۶ هسته: تقریباً ۶ ساعت
- اجرا تکهستهای (Local Workstation با ۱۶ هسته): حدود ۴۸ ساعت
- مصرف حافظه:
- در حالت موازی: هر نود تقریباً ۱۰۰ گیگابایت RAM مصرف کرد
- در حالت تکهسته: ۲۵۶ گیگابایت RAM مصرف شده و Swap موجب کندی بیش از حد میشود
- دقت نتایج:
- تفاوت در نتایج نهایی (جابجایی ستون فر) کمتر از ۰.۵٪ بین حالت تکهستهای و موازی قابل مشاهده بود که نشان دهندهی مقیاسپذیری خوب است.
- مزیتها:
- کاهش ۸ برابری زمان حل.
- امکان انجام Parametric Study همزمان با اجرای اصلی.
مزایا و چالشهای استفاده از ANSYS Motion با ابررایانه
۷.۱. افزایش بهرهوری پروژه
- زمان کوتاهتر حل مساله باعث تسریع فرآیند طراحی و بهینهسازی میشود .
- امکان انجام چندین شبیهسازی موازی برای مقایسه پارامترها و بهینهسازی سریعتر .
۷.۲. بهبود دقت و جزئیات مدل
- توانایی مدلسازی اجزای انعطافپذیر با Mesh ریزتر به دلیل منابع محاسباتی بیشتر
- شبیهسازی تحلیلی ارتعاشات در گستره فرکانسی بالا به علت تعداد گرههای بالای شبکه (High-Fidelity Modeling).
۷.۳. هزینه و پیچیدگی زیرساختی
- راهاندازی ابررایانه اختصاصی : نیاز به فضای فیزیکی، سرمایش، نگهداری و نیروی انسانی متخصص دارد که هزینهبر است .
- استفاده از خدمات ابری (Cloud HPC ): هزینهی ساعتی یا ماهیانه برای استفاده از منابع محاسباتی و انتقال داده.
- پیچیدگی نصب و نگهداری نرمافزار : نیاز به هماهنگی با تیم IT و مدیر لایسنس برای پشتیبانی از Floating License و بهروزرسانیهای دورهای.
نکات کلیدی برای پیادهسازی موفق
۸.۱. انتخاب سختافزار مناسب
- بررسی نیاز واقعی پروژه ( سایز مدل، تعداد اجزا، نوع تحلیل ) و تهیه نودهایی با منابع متناسب (CPU, RAM Network)
- در صورت استفاده از کارتهای GPU : اطمینان از سازگاری ANSYS Motion با شتابدهنده ها ی گرافیکی (در نسخه های جدید بیشتر از Rapid Solver GPU بهرهمند میشوند).
۸.۲. به روزرسانی نرم افزار و درایور ها
- نصب آخرین نسخه ANSYS Motion و اعمال Patch های امنیتی
- بهروزرسانی درایورهای MPI و کتابخانههای BLAS/LAPACK.
۸.۳. آموزش کاربران و مستند سازی
- تهیه راهنمای داخلی برای تنظیمات موازی و شیوه اجرای Job ها (استانداردسازی فایلهای SLURM/PBS).
- برگزاری کارگاههای آموزشی برای تیم مهندسی و IT جهت آشنایی با مفاهیم HPC و شبیهسازی موازی.
۸.۴. مدیریت نسخهها و پشتیبانگیری ( Backup)
- استفاده از سیستمهای کنترل نسخه (Git, SVN) برای فایلهای مدلسازی و اسکریپتها
- برنامهریزی دورهای برای تهیه Backup از نتایج شبیهسازی و فایلهای ورودی در سرور جداگانه.
نتیجهگیری
استفاده از ANSYS Motion در ترکیب با ابررایانه (HPC) ، گامی مؤثر در افزایش دقت، سرعت و کیفیت شبیهسازیهای دینامیک چندبخشی پیچیده است. با انتخاب سختافزار مناسب، پیکربندی صحیح نرمافزار، و بهینهسازی تنظیمات موازی، میتوان از منابع محاسباتی حداکثر بهره را برد. در این مسیر، چالشهایی نظیر هزینههای زیرساختی و نیاز به نیروی انسانی متخصص وجود دارد، اما مزیتهای فراوان در زمینه کاهش زمان حل، امکان انجام مطالعات پارامتریک و مدلهای با تفکیکپذیری بالا، ارزش سرمایهگذاری را به وضوح نشان میدهد.
در نهایت، توصیه میشود هر شرکت یا مرکز تحقیقاتی پیش از پیادهسازی، نیازسنجی دقیق انجام داده و با بررسی نمونههای موردی مشابه، ساختار ابررایانه و تنظیمات موازی را بر اساس اهداف پروژه خود بهینهسازی نماید.
کلمات مرتبط
ANSYS Motion، ابررایانه، شبیهسازی دینامیک، محاسبات موازی، HPC، شبیهسازی سیستم تعلیق، ANSYS Motion با ابررایانه، بهینهسازی شبیهسازی، مدلسازی چندبخشی، شبیهسازی دینامیک خودرو، تحلیل ارتعاشات، Multibody Dynamics، شبیهسازی دینامیک GPU
مقاله مادر: